|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt WinchBot 1.5Das Video zum Kapitel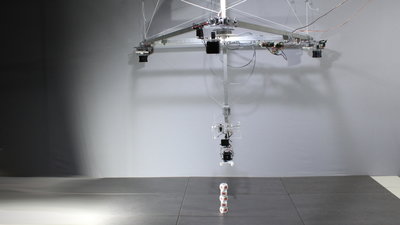
Für einen Messestand auf der SPS IPC Drives in Nürnberg war RS-Components auf der Suche nach einem Ausstellungsobjekt. Somit wurde schnell die Idee geboren, eine verbessere Version dieses recht ungewöhnlichen, über Seilzüge angesteuerten Roboters in´s Leben zu rufen. Kernkomponente des neuen Modells sind bipolare Schrittmotoren, welche die über Sensorscheiben-Rückkopplung gesteuerten Gleichstrommotoren ersetzen. Der Vorteil liegt darin, dass diese in deutlich kleineren Schritten angesteuert werden können. TeilelisteEntstanden ist der WinchBot aus einer Kooperation mit RS-Components, daher sind in der Tabelle die Links zu deren Online-Shop gelistet.
Mechanik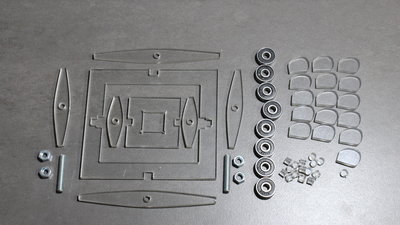
Die Bauteile der Mechanik habe ich mit meiner CNC v3.2 aus 5mm Acrylglas gefräst. 
Die Führung des zentralen Aluminumrohres ist etwas "schlanker" als beim Vorgänger gebaut. 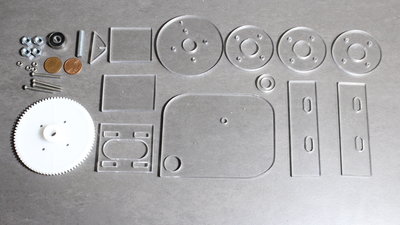
Die Teile der Seilwinden wurden für die Verwendung der bipolaren Schrittmotoren nur leicht abgeändert. 
Ich verwende Zahnräder aus dem RS-Sortiment an den Seilwinden. 
Den unteren Teil mit dem Greifer hatte ich zunächst wieder mit 5 Servos aufgebaut. Im Verlauf der Tests habe ich zwei der Servos... 
...durch kleinere bipolare Schrittmotoren ersetzt, um das Zittern des Greifers zu reduzieren. 
Da diese Schrittmotoren deutlich schwerer als die beiden Servos sind, habe ich die Rahmenkonstruktion nochmals überarbeiten müssen. 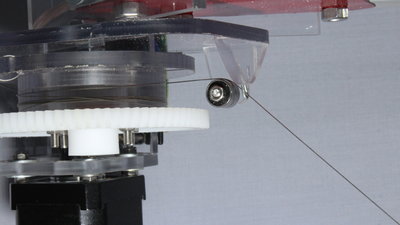
Das höhere Gewicht des unteren Teils hat dazu geführt, dass sich die dünnen Stahlseile an den Metallösen durchgescheuert haben. Kleine Kugellager vor den Ösen verhindern das nun. 
Der an der Decke hängende Rahmen ist mit Schnüren befestigt. Die Kreuzverspannung verringert das Schwingen des WinchBot - auch diesbezüglich macht sich das höhere Gewicht der Schrittmotoren am unteren Teil des Greifers deutlich bemerkbar. Elektronik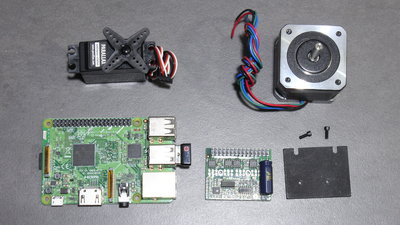
5 Schrittmotoren inklusive Treiberplatinen, 3 Servos und ein Raspberry Pi Model 3 werden zum Betrieb von WinchBot 1.5 benötigt. Die drei Schrittmotoren an den Winden ziehen einen Phasenstrom von 1.68A an 2.8V und werden über Geckodrive G250X mit 10 Mikroschritten angesteuert. Die beiden unteren Schrittmotoren sind mit 400mA an 12V etwas leistungsschwächer, dafür aber auch leichter. Diese werden über L298D Chips im Vollschrittmodus angesteuert. Die drei Servos dienen zum Öffnen und Schließen des Greifers und können diesen um zwei Achsen drehen. 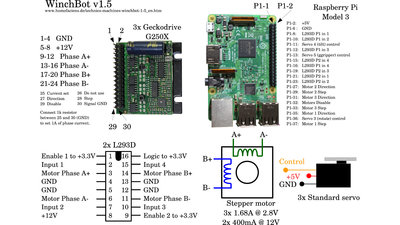
Software
Angesteuert wird WinchBot 1.5 durch das schon beim Vorgänger gezeigte, jedoch weiter ausgebaute Browser-Interface. Die Steuerung und Programmierung von Bewegungsabläufen kann somit plattformunabhängig von vielen Endgeräten aus erfolgen. Hier verwende ich ein Nokia 3 und selbst mit diesem preisgünstigen Smartphone gelingt die Programmierung der Bewegung problemlos. Auf dem Raspberry Pi läuft der Webserver "Apache" mit Unterstützung für Perl Scripts. Koppelt man eine Bluetooth-Tastatur mit dem Smartphone und installiert einen simplen Texteditor sowie einen ssh-Client, so kann man sämtlichen Quellcode der verwendeten Programme editieren und somit jederzeit vor Ort anpassen. Um Robotik zu betreiben, bedarf es keiner umfangreichen Entwicklungsumgebung oder teuren Hardware - wie zu sehen funktioniert das auch mit einem günstigen Taschencomputer - vorausgesetzt man selbst ist smarter als sein Phone... Die Software inklusive Schaltplänen gibt's als Download. Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|